Research
Computational models of biological motor control, neurorobotics, and dynamical systems analysis.
Featured
 Software · In Development
Software · In Development
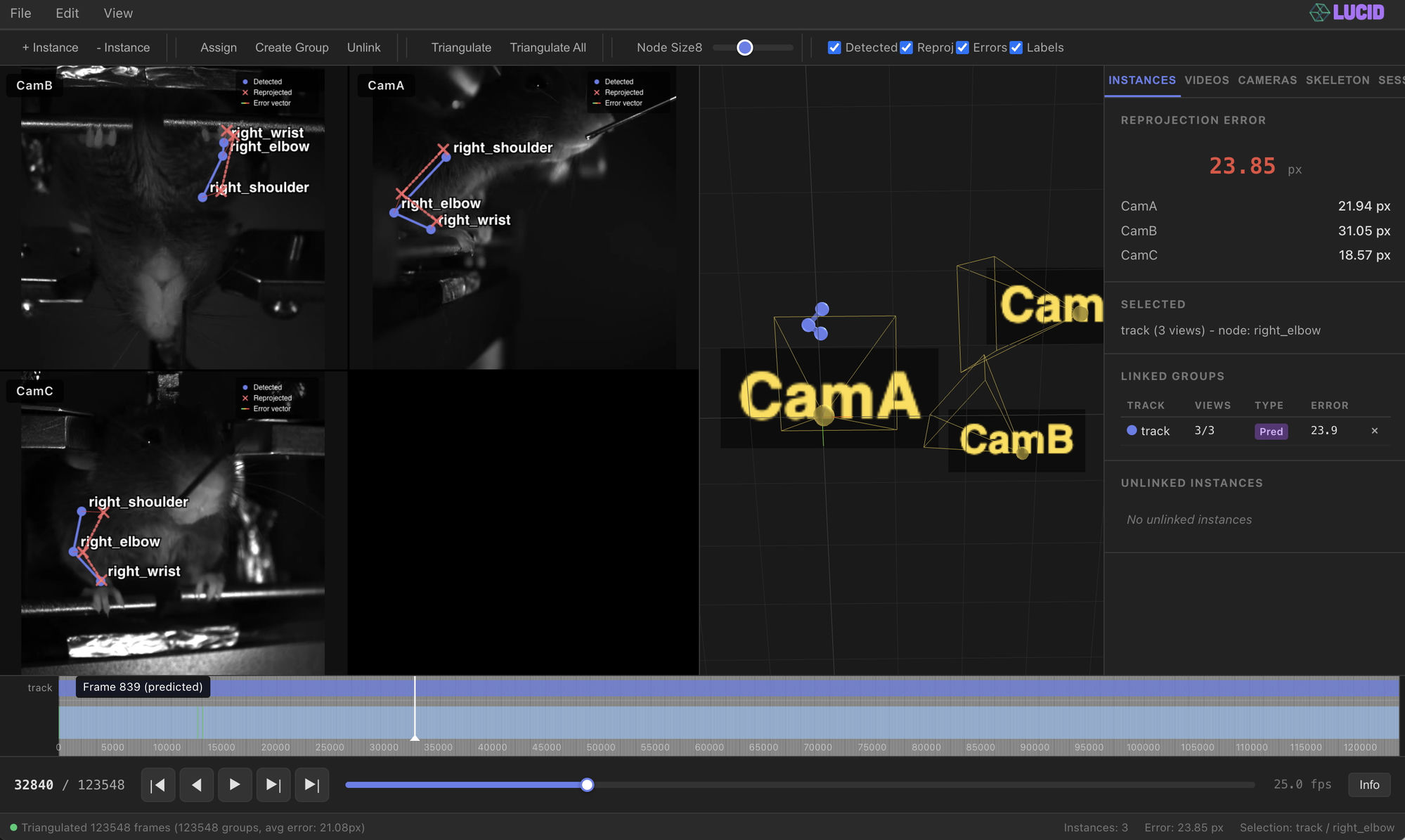
luc3d — Label Unification and Correspondence in 3D
A web-based multi-view 3D pose annotation GUI built with vanilla JavaScript and Three.js. Features multi-camera video playback, DLT triangulation, reprojection error visualization, cross-view tracking, and SLEAP-compatible import/export. Although browser-based, it loads locally mounted files quickly for a fluid user experience. No build system — pure static files.
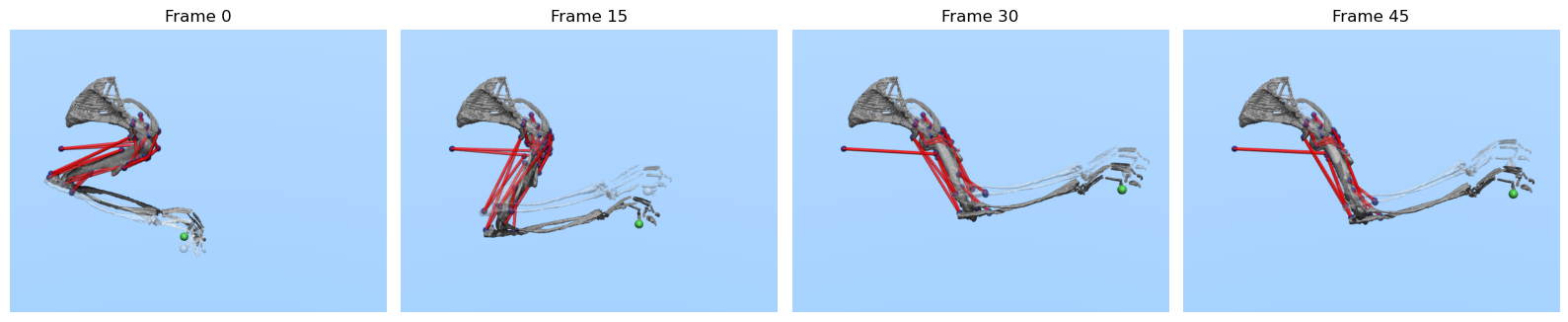
Massively Parallel Imitation Learning of Mouse Forelimb Musculoskeletal Reaching Dynamics
Our paper has been accepted to the NeurIPS 2025 — Data on the Brain & Mind: Concrete Applications of AI to Neuroscience and Cognitive Science Workshop. We utilize MIMIC-MJX which uses JAX and MuJoCo-MJX to elicit speeds of more than 1 million steps per second through the physics and RL environment. This enables massively parallel imitation learning of mouse forelimb musculoskeletal reaching dynamics, bridging high-fidelity biomechanical simulation with scalable reinforcement learning to study the neural computations underlying motor control.
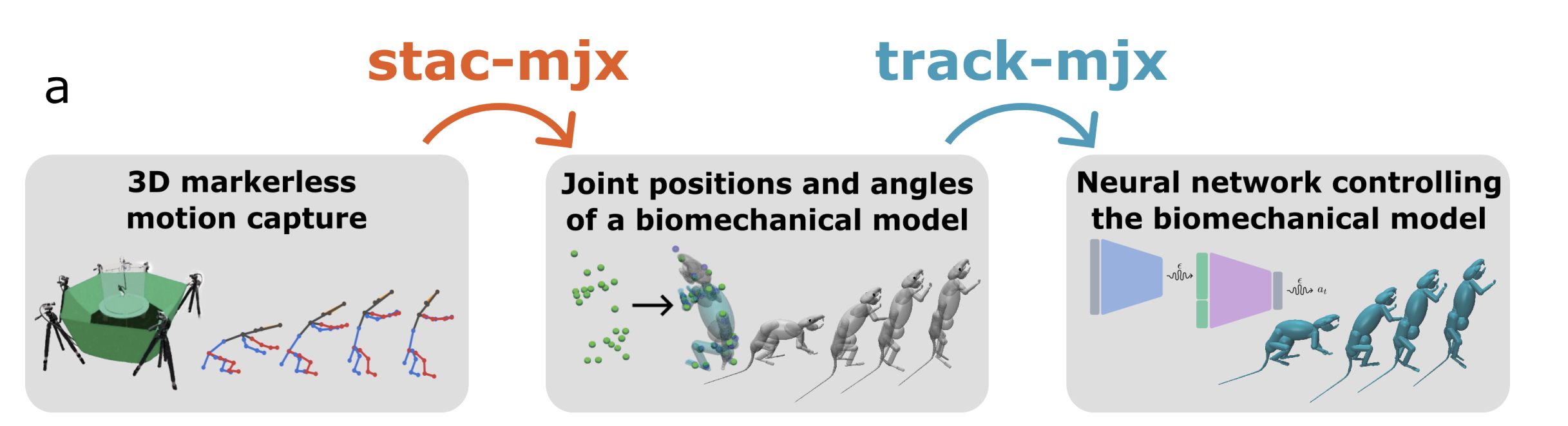
MIMIC-MJX: Neuromechanical Emulation of Animal Behavior
A new collaborative preprint on our neuromechanical modeling framework, integrating stac-mjx and track-mjx for data-driven control of biomechanical bodies in physics simulation. MIMIC-MJX enables high-speed imitation learning from motion capture data through fully differentiable, GPU-accelerated simulation, allowing researchers to fit biomechanical models to real animal movement data at unprecedented scale.
Publications
-
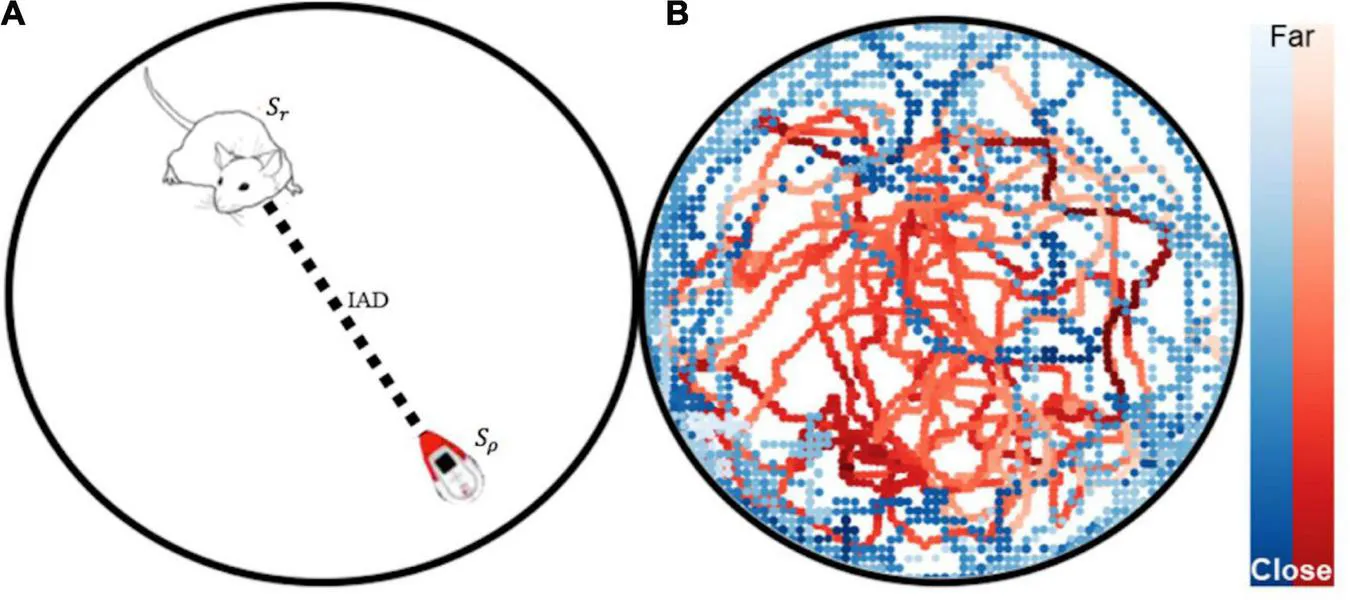
Interactive Neurorobotics: Behavioral and Neural Dynamics of Agent InteractionsFrontiers in Psychology, 2022A review of how robotic agents can be used as controlled social stimuli to study rodent behavioral and neural responses, integrating embodied simulation with multisensory integration paradigms.
-
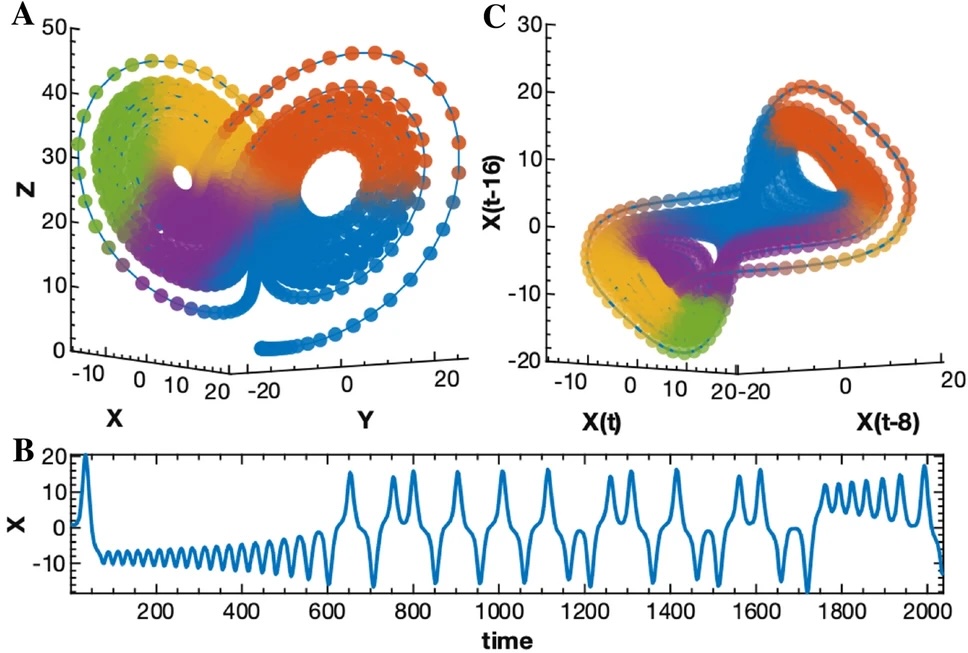
Convergent Cross Sorting: A Framework for Understanding Coordination Among Nonlinear OscillatorsScientific Reports, 2021A novel nonlinear dynamical systems method for estimating dynamic coupling between brain regions, extending convergent cross mapping to detect directional interactions in neural time series data.
-
Conceptual Blending in Animal Cognition: A Comparative ApproachCogSci 2021 Symposium (co-organized)
-
PiRat: An Autonomous Framework for Studying Social Behavior in Rats and RobotsIROS 2018An autonomous robotic platform for studying rat social behavior in naturalistic settings, enabling controlled interaction experiments between live rats and robot agents.
-
AmygdalaEncyclopedia of Animal Cognition and Behavior, 2017
-
HippocampusEncyclopedia of Animal Cognition and Behavior, 2017
Video
PiRat: rat-robot interaction project in collaboration with Janet Wiles' CIS Lab at UQ.
Affiliations